
















Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.

Shenzhen Kingsom Technology Co., Ltd.
Marca: Kingsom
Paquete: Cartón de madera
productividad: 10000sets/year
transporte: Ocean
Lugar de origen: Shenzhen
Apoyo sobre: Strong
Certificados : CE,CCC,ROHS and ISO9001:2008
Hafen: Shenzhen Port
Tipo de Pago: L/C,T/T,Paypal,Western Union
Incoterm: FOB,EXW
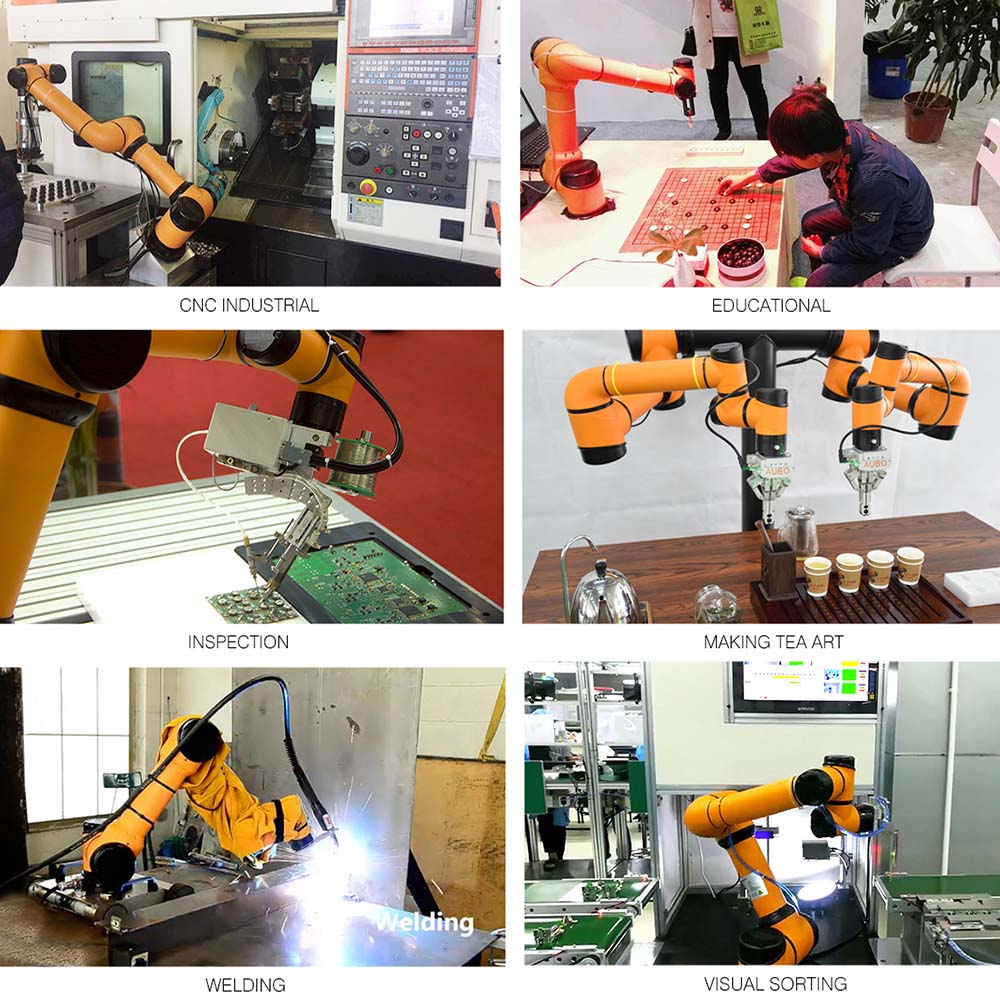
Manipulador industrial móvil Kingsom Collaborative
El manipulador de forja es un dispositivo automático que imita parte del movimiento de la mano humana y completa las funciones de carga y descarga, transferencia entre estaciones según procedimientos preestablecidos, pistas u otros requisitos. El uso de manipuladores en la producción puede garantizar la calidad del producto, mejorar la productividad laboral, liberar a los trabajadores del trabajo manual pesado y repetitivo y puede reemplazar las operaciones humanas en entornos especiales como alta temperatura, alta presión, baja temperatura y polvo.
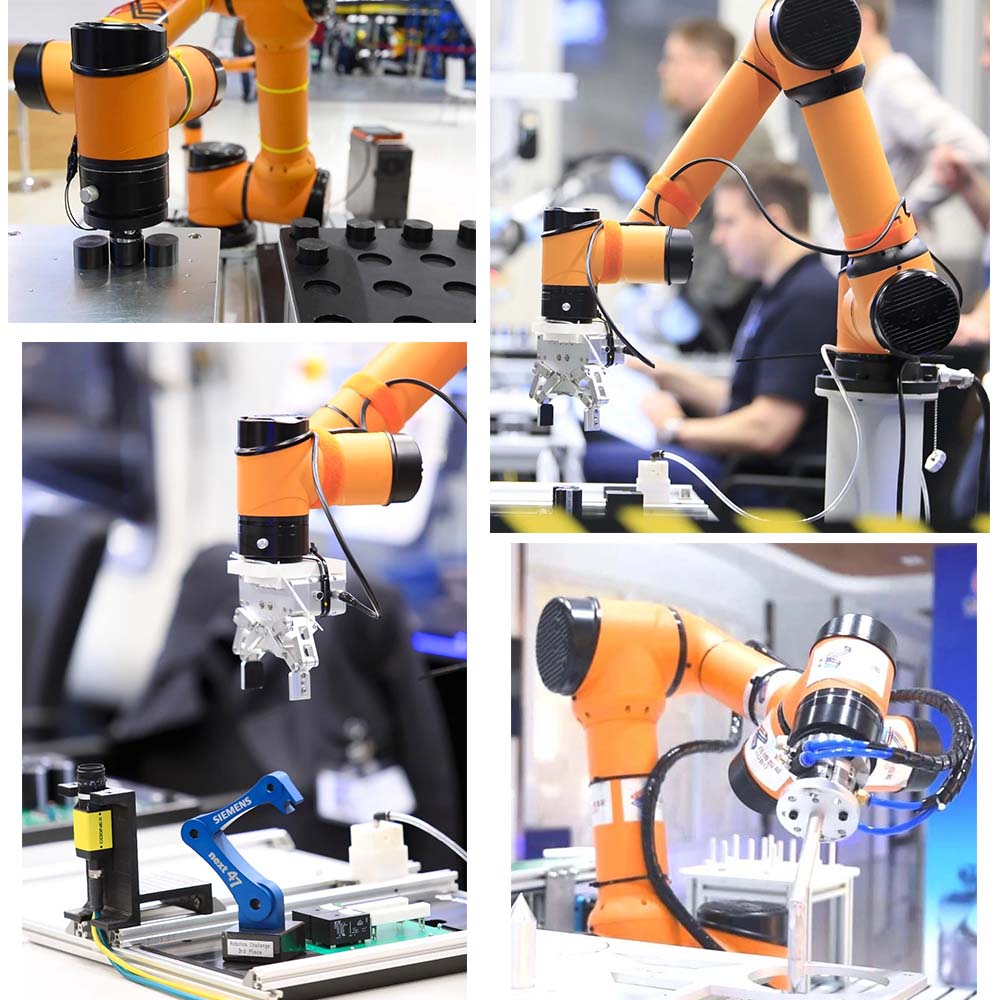
Función colaborativa : Guía para enseñar (planificación de movimiento de cinemática inversa), esta operación manual del robot permite programar el robot de forma rápida y sencilla mediante demostración sin conocimientos de programación. Trabaja al lado del operador humano sin valla de seguridad, láser o sensores (después de que se realiza una evaluación de riesgos). La interfaz de usuario colgante Teach para programación (cinemática directa) permite la programación y simulación en línea a través de una tableta con pantalla táctil. Ligero, flexible y fácil de reutilizar, este robot pesa menos de 24 kg.
Funciones de seguridad : diseñado de acuerdo con los requisitos de seguridad PLd e ISO 10218-1 (limitación de potencia y fuerza 5.10.5) y cumple con la mayoría de las especificaciones para la operación colaborativa del robot. El diseño de limitación de potencia y fuerza lleva al robot a una parada de protección si se exceden los límites o se detecta una colisión. La velocidad y la fuerza se pueden ajustar para adaptarse y optimizar cualquier aplicación fácilmente. Los sensores integrados en los accionamientos de los motores proporcionan información en tiempo real para evitar situaciones peligrosas. Los botones de parada de emergencia están colocados en la caja de control y la caja de control con una distancia de frenado inferior a 1 mm.
Arquitectura de código abierto: red de bus CAN utilizada en este robot para que varios microcontroladores se comuniquen entre sí. ROS (Robot Operating System) es compatible a través de API. El hardware adopta protocolos de bus CAN con extensiones de interfaz de E / S abiertas. Integre fácilmente el robot en los sistemas de producción existentes.
Retorno de la inversión (ROI): bajo costo de propiedad, no se necesitan conocimientos de programación y la facilidad de integración en un sistema se suman a un rápido retorno de su inversión, el ROI promedio es de 3 a 4 meses. Los trabajos de corto plazo y entornos de alta mezcla, como la automatización de laboratorio o el cuidado de máquinas, son ejemplos principales de industrias que necesitan una reubicación rápida. El espacio en el piso es un costo premium en la mayoría de las empresas, generalmente más que el equipo. Un robot liviano y de tamaño pequeño será un gran beneficio para los costos de producción de cualquier empresa de tamaño. Reutilice, vuelva a implementar o reinvente aplicaciones con el mismo robot, cambie el número de grados de libertad, las uniones y los tubos son modulares, lo que facilita su reparación y reconfiguración.
Inteligencia
1. Los sistemas de visión se pueden integrar en el controlador.
2. Sistema de software basado en la gestión de plataforma en la nube que realiza mantenimiento remoto, diagnóstico de fallas y actualización en línea del firmware.
3. Esta plataforma de robot de investigación se utiliza ampliamente en todo el mundo en laboratorios de investigación corporativos y para investigación académica en robótica.
Diseño modular
1. El robot se puede configurar para tener entre cuatro y siete grados de libertad para cumplir con los requisitos del usuario.
2. La longitud de la junta se puede personalizar para enlaces más largos o más cortos.
Además de la máquina de brazo robótico, nuestra empresa también tiene muchos productos, como extractor de humos de soldadura, dispensador de pasta de soldadura, alimentador de tornillo de mano neumático, alimentador de tornillo automático. Si necesita estos productos, puede contactarnos, le responderemos lo antes posible.
Especificaciones técnicas
| Controlled Axed DoF | 6 axes (J1, J2, J3, J4, J5, J6) J7max |
| Reach | 924 mm |
| Working Range | 880 mm |
| Payload | 5kg |
| Weight | 24kg |
| Footprint | 172 mm diameter |
| Collabortative Operation |
Safety monitored stop, speed and separation monitoring, hand guid operation, power and force limiting design. |
| Certifications |
ISO 10218-1:2011, EN 60204-1:2006 +A1:2009 ISO 12100:2010, ISO 13849-1:2008, CE |
| Repeatability | ±0.02mm |
| Linear Velocity | 2.8 m/s adjustable |
| Power Consumption | 200 watts typical application |
| Materials | Aluminum, Steel, Plastic |
| Ambient Humidity | Normal 75% RH or less without frost, or dew, 85% RH short term |
| Ambient Temperature | 0 to 45 degrees Celsius |
| IP Classification of Robot | IP 54 |
| Programing |
Teach Pendant with user interface, guide to teach, ROS compatibility through an API, Lua, Python. |
| Communication | CAN Bus |
| Motor Type | Harmonic drive 48 Volt |
| Installation Orientation | Any celling, Floor, Wall |




| Axis | Working Range | MAximun Speed | Max Joint Moments |
| J1 axis rotation base | (+/-)175° | 150°/sec | 207Nm |
| J2 axis rotation shoulder | (+/-)175° | 150°/sec | 207Nm |
| J3 axis rotation elbow | (+/-)175° | 150°/sec | 207Nm |
| J4 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |
| J5 axis wrist swing | (+/-)175° | 180°/sec | 34Nm |
| J6 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |

| Dimensions (LxWxH) | 683x220x622 mm | I/O Ports | User I/O | Safety I/O | |
| Weight | 20kg | Digital in | 16 | 16 | |
| Cabling | 5m | Digital Out | 16 | 16 | |
| Colour | Black | Analog in | 4 | - | |
| Communication | TCP/IP, Modbus-RTU/TCP | Analog out | 4 | - | |
| Power supply | 100-240 VAC, 50-60Hz | Power input | 24 Volts | ||
| IP Classification | IP54 | Power output | 3A | ||


PRODUCTOS POR GRUPO : Robot Arm Machine > Kingsom Nueva Llegada Manipulador de Forja Industrial Brazo Robot












Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.